Electric Off-Road Trike Design Project
Undergraduate Project
Project Goal
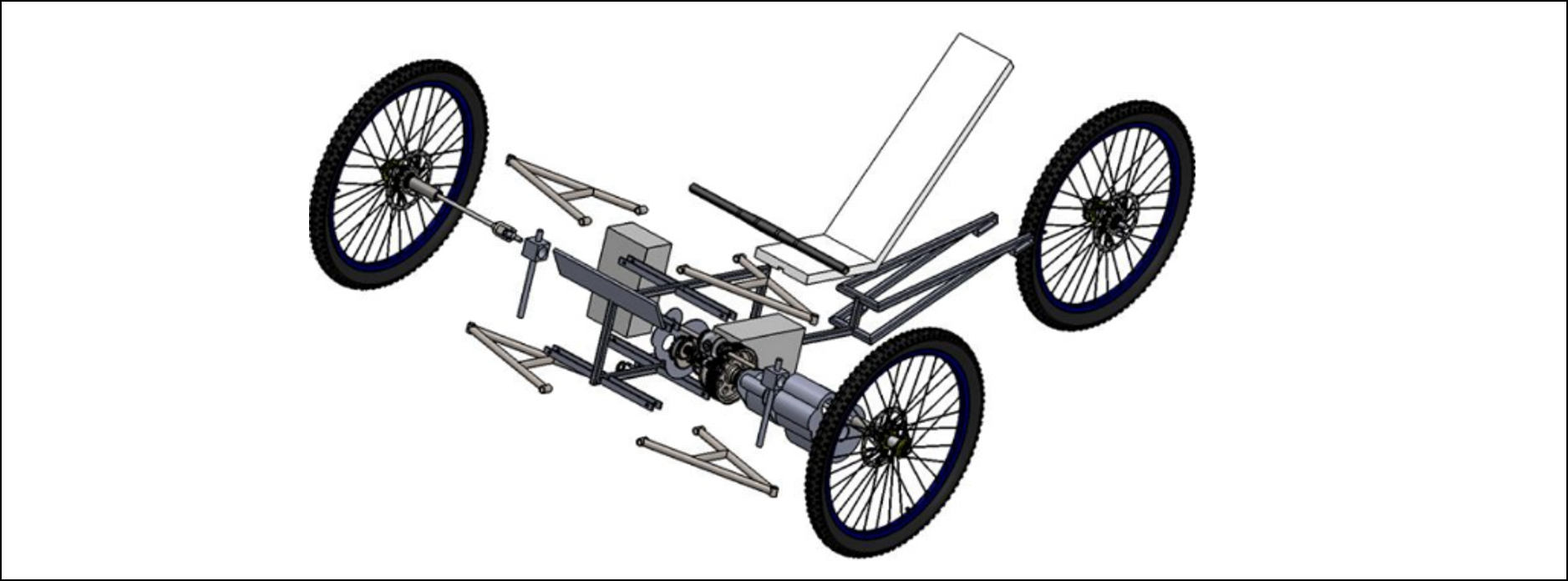
The purpose of this project was to create an all-wheel drive and fully electric off-road tricycle which could be operated by a range of users capable of dexterous motion only from the waist up.
Challenges
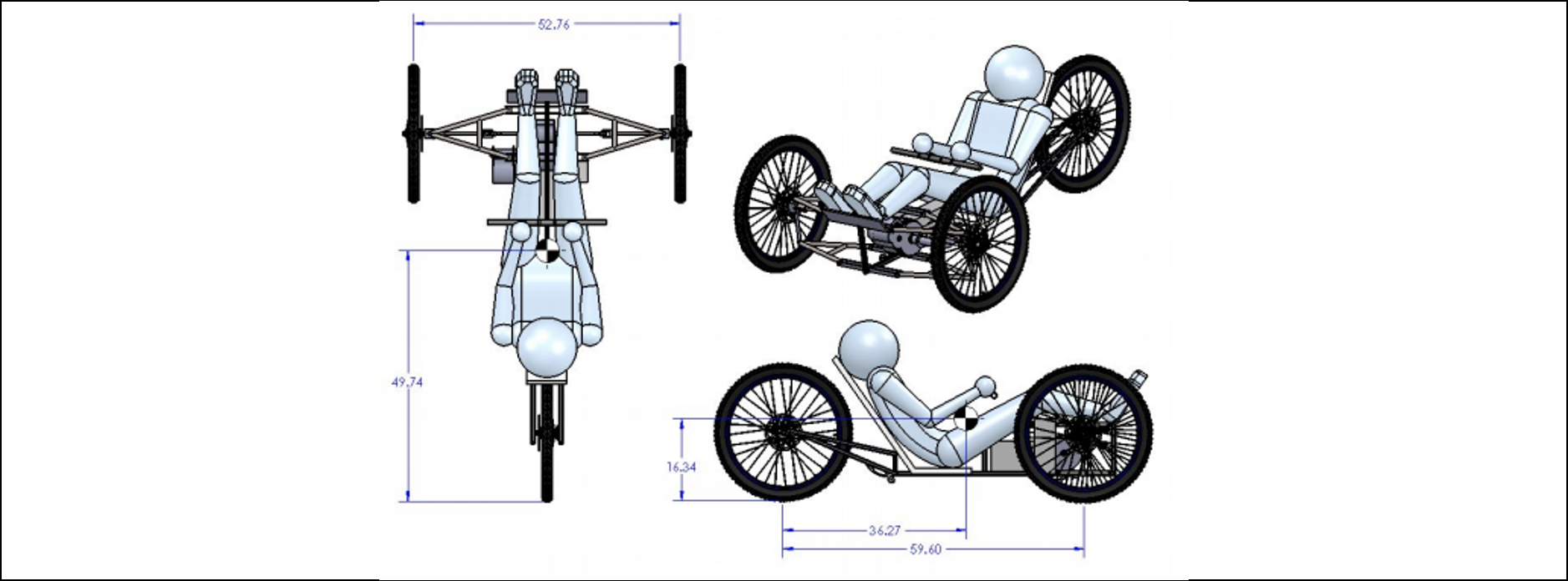
The trike needed to be powered entirely by a single mid-mount electric motor. Additionally, it needed to meet the minimum requirements for off-road biking (25% grade) and have a turning radius of 43 feet. The trike also needed to reach a top speed of 15 mph on asphalt and traverse at least a 45 degree incline. Finally, the overall stability of the product and user safety were critical to design considerations.
My Solution
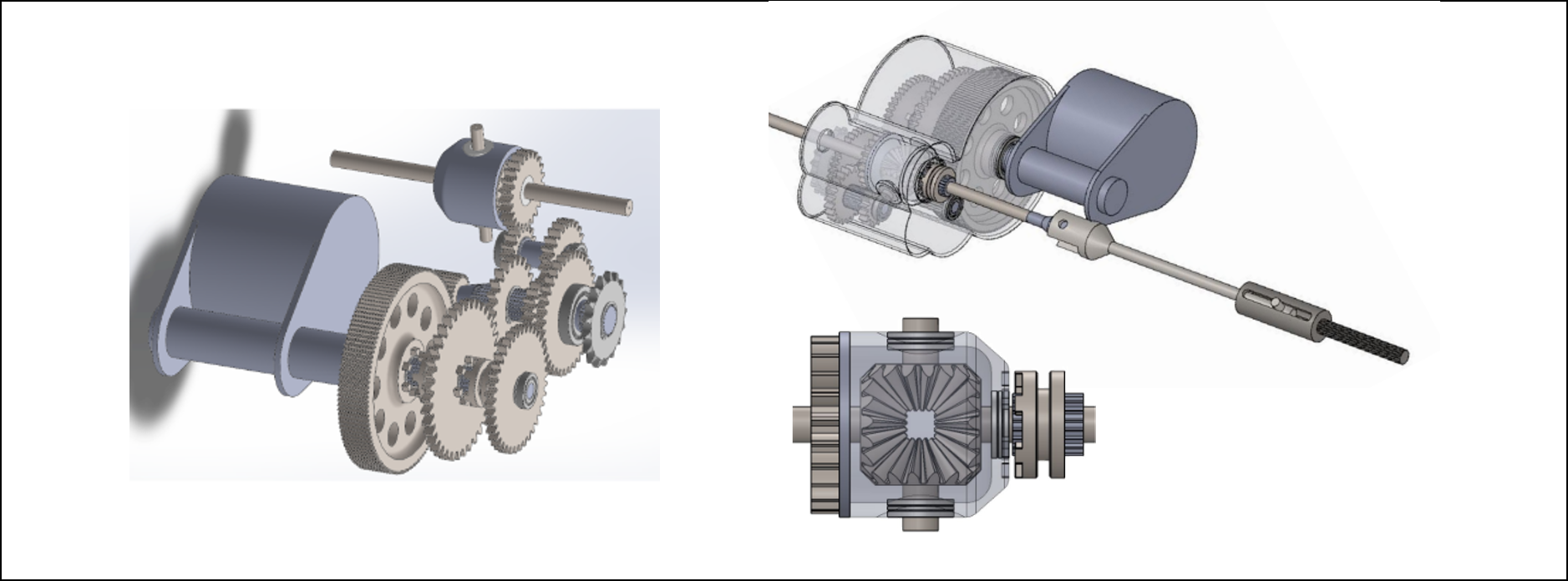
The drivetrain gear ratios were optimized in order to meet maximum speed, incline angle, maximum cost, and acceleration criteria. Additionally, batteries on the market were researched and selected based on client requirements. Lastly, an angled vehicle design was chosen to shift the center of gravity location, which improved stability and allowed travel along 45 degree inclines and off-road conditions.
Notable Features & Accomplishments
- Designed a three-speed powertrain system which included gear mesh configurations, shifting capabilities, differential locking mechanisms, chain selection, gearbox bearing selection, and custom splines.
- Constructed calculators and iterative design analysis tools for all mechanical components.
- Created a complete 3D CAD model in SOLIDWORKS as well as schematic drawings using GD&T standards.
- Utilized first principles equations of motion using Newtonian and Euler laws which informed design decisions.
- Achieved a 20-mile range for the battery-powered trike design.
Skills Used
- CAD (SOLIDWORKS)
- GD&T
- Component Selection & Market Research
- Designing for User Safety
- Electromechanical System Modeling
- Powertrain System Design