Modeling a Human-Robot System using Deep Learning
VA Hospital R&D / Master's Thesis
Links
Project Goal
Inverse dynamics from motion capture is the most common technique for analyzing human biomechanics. However, this method is time-intensive, limited to a gait laboratory setting, and requires a large array of reflective markers to be attached to the body. A practical alternative must be developed to provide biomechanical information to high-bandwidth robotic prosthesis control systems to enable predictive controllers.
While the ultimate goal is to implement a model-based control strategy for prosthetic devices, a key milestone and the focus of this project was the development of models that can predict ankle mechanics, i.e., inverse dynamics. In addition, the model inputs must only include signals from sensors that can be integrated with a real-time control system.
Challenges
Modeling and predicting human-prosthesis behavior is challenging due to highly nonlinear system dynamics, adaptations from the user, and a limited set of model inputs from wearable sensors. Most biomechanics research up to this point has been limited to human intent or activity classifiers for finite state machines. While these studies show the potential of using large datasets for assistive device applications, the field has not fully explored using non-categorical training data to build predictive models of human-robot dynamical systems (e.g, estimating dynamics that cannot be observed instantaneously). If system models can be derived from available data, many model-based and continuous control methods would possible in the context of prosthetics research.
My Solution
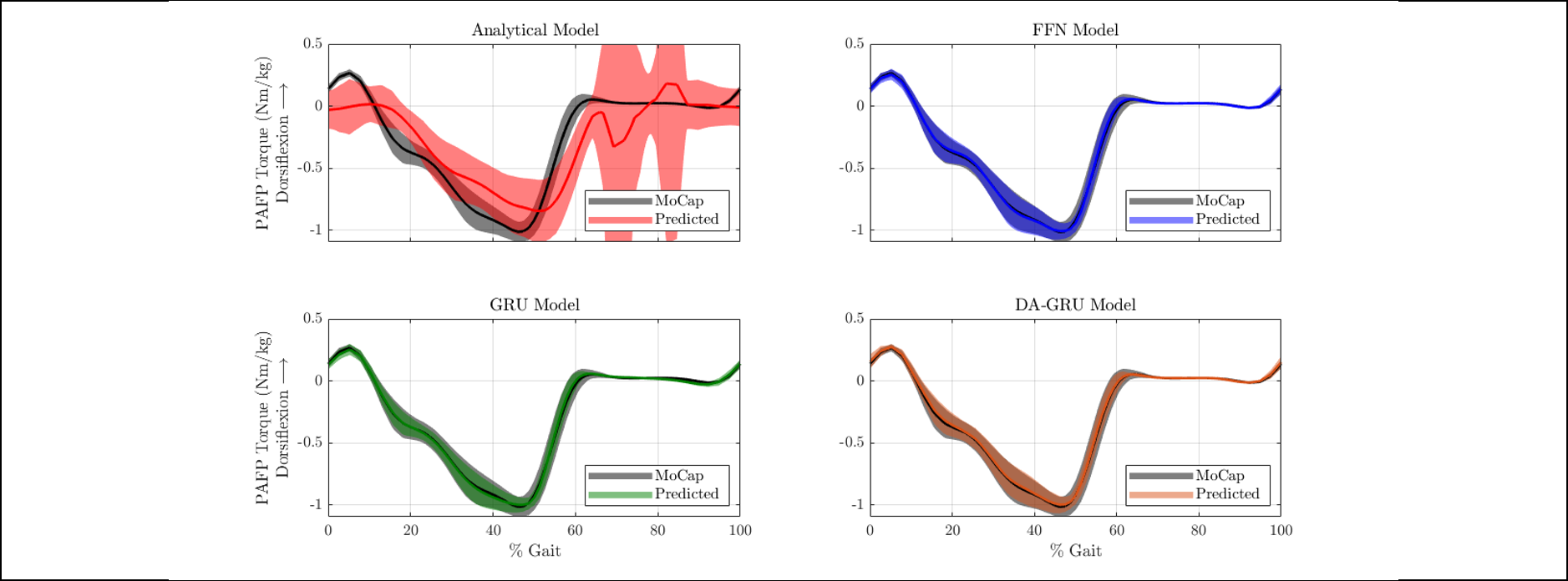
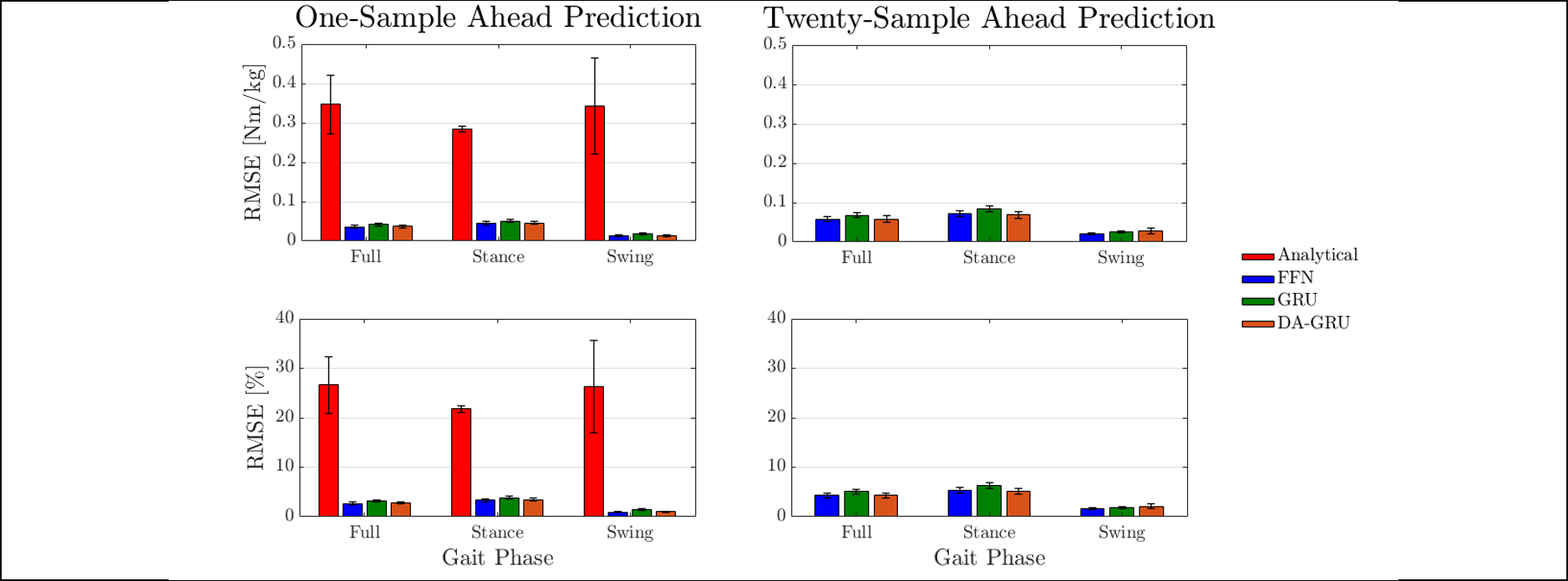
Three deep neural network (DNN) models were trained to provide accurate total ankle torque predictions using model inputs that can be measured in real-time (i.e., encoder, load cell, and IMU outputs). Each DNN was trained to predict ankle torques from inverse dynamics one sample into the future. The one-sample ahead prediction performances of the DNNs are then directly compared to the one-sample ahead prediction performance of an analytical model of the human-prosthesis system, which was derived based on first principles. The ability of each DNN to predict twenty samples, approximately half a gait cycle, into the future was also assessed. Additionally, a hyperparameter optimization protocol was conducted which automatically selected the model architectures and learning parameters that resulted in the most accurate predictions.
The trained deep neural networks predict ankle torques one sample into the future with an average root-mean-square error (RMSE) of 0.04±0.02 Nm/kg, corresponding to 2.9±1.6% of the ankle torque's dynamic range. Comparatively, a manually-derived analytical regression model predicted ankle torques with a RMSE of 0.35±0.53 Nm/kg, corresponding to 26.6±40.9% of the ankle torque's dynamic range. In addition, the deep neural networks predicted ankle torque values half a gait cycle into the future with an average drop in performance of 1.7% of the ankle torque's dynamic range. This application of deep learning provides an avenue towards the development of predictive control systems for powered limbs aimed at optimizing prosthetic ankle torque.
Notable Features & Accomplishments
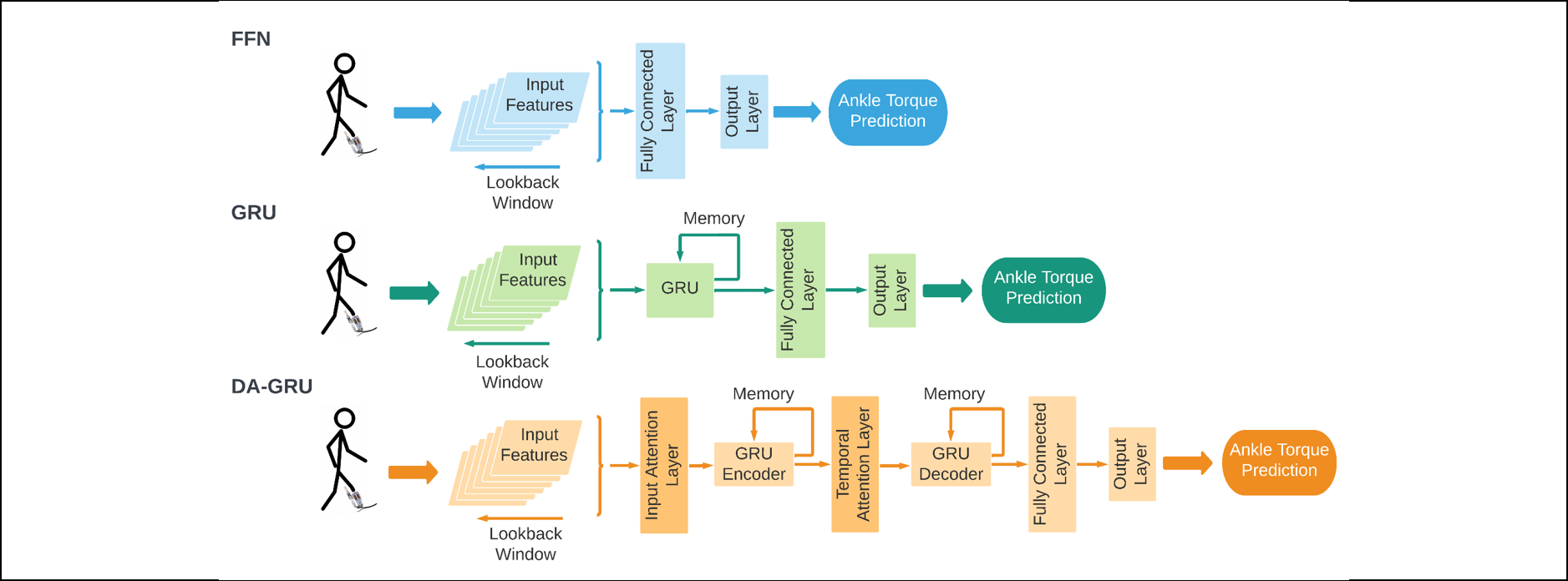
- Three deep neural network architectures were developed and trained: (1) feedforward network (FFN), (2) gated recurrent unit (GRU), and (3) dual-stage attention-based gated recurrent unit (DA-GRU)
- Gate mechanisms were added which add information to or remove information from the state across timesteps, making them particularly effective for learning temporal dependencies
- Attention mechanisms were included which adaptively extract the most relevant features and hidden state information using an encoder-decoder architecture
- Machine learning data processing methods such as tensor conversion, shuffling, mini-batches, feature normalization, data augmentation, and rolling lookback time windows were utilized for improved network training
- Network training hyperparameters were optimized using the Optuna framework which utilized Bayesian search and pruning techniques
- Validation datasets and an early stopping protocol were implemented in order to reduce the chances of overfitting
Skills Used
- Python
- PyTorch
- Deep Learning
- Machine Learning
- Neural Networks
- GRU
- Attention Mechanisms
- Hyperparameter Optimization
- Neural Network Architecture Optimization
- Optuna
- System Identification
- Predictive Modeling
- Time Series Analysis & Forecasting
- Feature Manipulation
- Data Analysis
- Data Collection
- Supervised Learning
- Regression
- Least-Squares
- Optimization